1. 投送装置设计
- 结构类型:
采用滚筒 – 皮筋复合结构,核心由 4 个滚筒组成,通过齿轮传动与皮筋弹力配合实现球体的抓取、输送与投送。该设计的突出优势是通过滚筒的有序排列加大了球体存储空间,可同时容纳多个球体,满足连续投送需求。
- 核心部件:
- 动力系统:配备 2 个 5W 电机和 1 个 11W 电机,其中 11W 电机通过链条传动驱动 2 个滚筒,另外 2 个滚筒由 5W 电机分别独立驱动。电机功率分配依据滚筒功能设定 ——11W 电机负责带动承载主要输送任务的滚筒,确保足够动力;5W 电机驱动辅助滚筒,平衡能耗与效率。
- 辅助结构:在装置后方加装多组皮筋,利用皮筋的弹性张力紧贴球体,一方面防止球体在输送过程中掉落,另一方面通过弹力辅助球体沿滚筒上升;每个滚筒对应不同任务桥高度,通过调整滚筒转速与角度,实现对不同任务桥的精准投送。颜色传感器-可以清晰分辨球体颜色,若并非正确球体,将调动上滚筒反转,将球吐出机器。
- 工作原理:
动作流程分为吸球阶段与投送阶段。吸球时,intaker(入球装置)将球体导入滚筒组,4 个滚筒同步转动,借助滚筒表面摩擦力与后方皮筋的推力,带动球体沿滚筒螺旋上升至顶部网兜;投送时,根据目标任务桥位置,对应滚筒加速转动,配合网兜下方的触发机构释放球体,完成投送。
2.原型制作与迭代过程
- V1 版本问题与改进:
- 核心问题:投送力度不足,球体无法顺利推入任务桥。经测试发现,滚筒转速过低导致球体获得的初速度不够,难以克服任务桥入口的轻微阻力。
- 改进措施:将滚筒转速提升,增强球体投送时的动能,确保其能稳定进入任务桥。
- V2 版本优化:
- 核心问题:球体在网兜中易发生卡顿,尤其当多个球体堆叠时,易因摩擦力过大或位置偏移导致无法顺利释放。
- 改进措施:在网兜出口处设计基带刮片,刮片随滚筒同步转动,当球体接近出口时,刮片主动将球体从网兜中剥离,引导其进入投送轨道,解决卡顿问题。
- 最终版本参数:
- 滚筒数量:4 个,直径 4 英尺,长度8英尺
- 电机配置:11W 电机 1 个(链条传动,带动 2 个滚筒),5W 电机 2 个(分别驱动 1 个滚筒);
- 投送范围:覆盖全部任务桥。
3.总结与展望
- 当前方案优势:
- 滚筒 – 皮筋复合结构兼顾存储与输送功能,可高效完成球体的抓取、提升与分类投送;
- 经 V2.0 优化后,卡顿问题基本解决,投送流程的连贯性显著提升。
- 待优化方向:
- 投送稳定性仍需提升:目前小部分投送存在角度偏差,导致球体落在任务桥边缘或外侧。计划通过调整滚筒直径,优化球体与滚筒的接触点,减少因离心力不均导致的偏差。
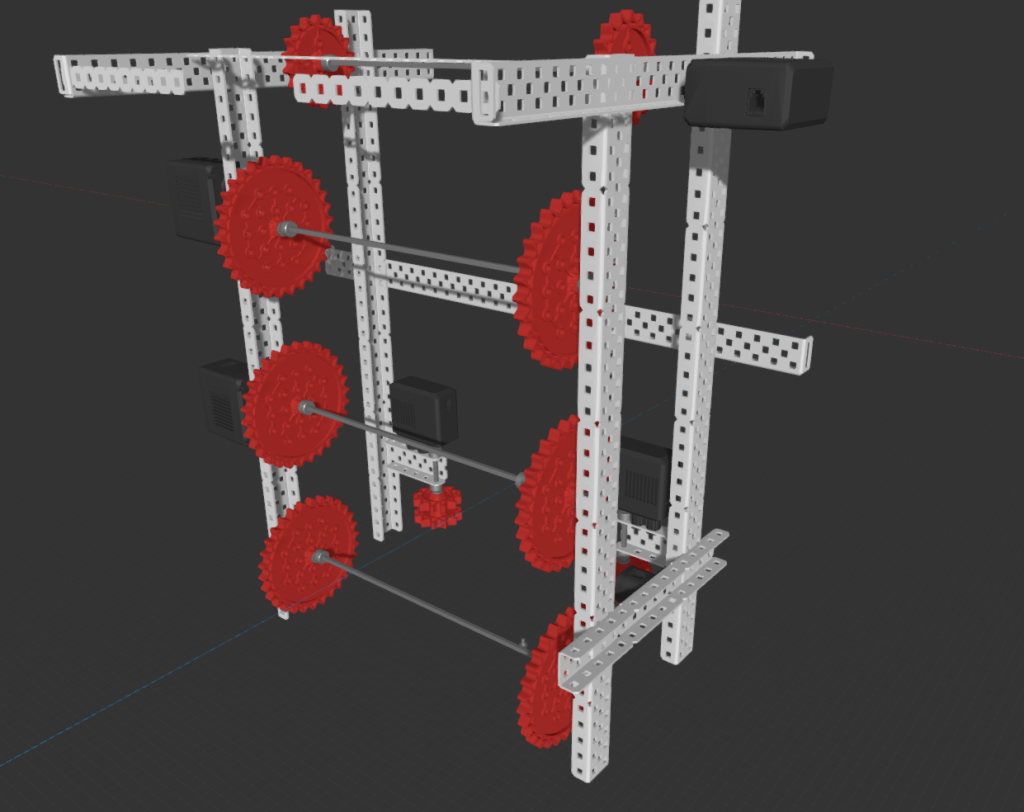
以下是机器人吸球/投送装置的CAD图: